【フレキシブル基板にチャレンジ】シリーズ とは
エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けします。
電卓編の次のシリーズとして新たにロボットアーム編のスタートです。引き続きよろしくお願いします!
<< 前の記事 次の記事 >>
挨拶
こんにちは。高橋です。
今回はロボットアームの設計についての話です。ぶっちゃけこの記事丸ごと基板関係ねえんじゃねえの、と思う方もできれば踏み止まっていただきたいです。
構造について
前回の記事で述べた通り、今回は垂直多関節ロボットを作ります。
垂直多関節ロボットとは多関節ロボットの構造の一種です。
ロボットアームと聞いてまず思い浮かべるような形状ですね。

△こういうの
設計の上で地味に面倒だったのが歯車の設計ですね。
設計にはAutodesk社のinventorという3DCADを使っているのですが、inventor君の歯車設計ツールがこれまた非常に使いづらく…
そもそも歯車の設計は初めてだったのでそこでも手古摺ったのですが、それ以上にinventor内の用語と一般的な歯車用語の間に齟齬があったりなどして正直ここで嫌になりました。
それ以外にも、3Dプリンターで出力した部品が微妙に設計した寸法と違う故の支障が多く、印刷を何回もしなおして微調整をする必要もありました。
まあこの辺は基板とはあまり関係が無いので省略します。
以下、適当に試作物の残骸を。
3Dプリンターについてはこちら、【フレキシブル基板にチャレンジ!】番外編[9]:3Dプリンター導入も合わせてご覧ください。

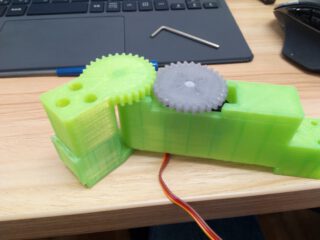
△ラピットプロトタイピングの暴力
ちょっとだけフレキの話
導入編で書いた通り、今回は基板をバネ状にすることで関節を曲げた際の伸び縮みの吸収を図っています。
その為に用意したのがこちらです!

△made by Tarantula
今回はこれをプレス型のように用います。ヒートガンで加熱した基板を上下からこの型で挟むことで成型するという魂胆です。
PETの軟化温度は200℃付近ということで、融点が200℃付近のPLAで型を作って大丈夫かな~とも思いましたが、なんだかんだで150℃くらいでも十分曲がってくれました。
ただ実際に型として使った際に問題がありすぎたので、今後もっと良い型を作って比較する予定です。
また、ガラケー(ガラパゴスケータイ)やPC等のヒンジ部に採用例の多い方式と似たものも採用しています。
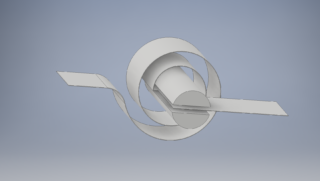
少し大げさな図ですが概ねこんな感じです。曲げによって発生する基板の伸び縮みを巻きの部分で吸収してくれます。
導入編の記事で「ハードとソフトを両方自由に設計できるから自由度が高いのでは」と言いましたが、確かにその通りでした。
フレキをとりあえずkicad上で作ってみて紙で印刷し、アームに沿わせて確認してから基板ないしアームの寸法の微調整。
前回の電卓では経験ゼロなのに初手で基板を印刷して実装に失敗するといった💩ムーブをかましてしまったので、二度とこういったアホな事はしないようにしたいですね。
もし初っ端で成功してたとしてもマイコンへの書き込みでしくじってたから結局再設計は免れなかったけど
パパっと完成(大嘘)
完成したロボットアームの全容がこちら!

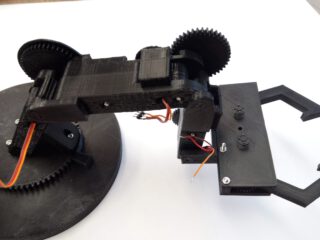
まあこれから、これからここに基板を載せていくので…
まとめ
機体設計は非常に手間でした。具体的に言うと機体の設計と修正だけで3か月以上掛かっています。基板を作る会社で何やってるんだ俺…
まあオフィス移転や我々の個人的な用事等も重なってしまったのもあるのですが、それにしてもめちゃくちゃ時間がかかってしまいました。
ただ今回の事で3Dプリンターに関する知見を大いに得られたので、次回以降はもう少し短時間で設計できるかと…!
次回は回路設計の話です。ご期待下さい。