【フレキシブル基板にチャレンジ】シリーズ とは
エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けします。
電卓編の次のシリーズとして新たにロボットアーム編のスタートです。引き続きよろしくお願いします!
<< 前の記事 次の記事 >>
挨拶
こんにちは、平野です。
今回からロボットアームの回路設計のおはなしをしていきたいと思います。
なんだか長くなってしまいそうなので、複数回にわたって更新して行く予定です。
はじめに
ロボットアーム編の初回でもちょっと触れましたが改めて。
前回の電卓編では、電卓の基板や配線、さらにはキーボード部分をフレキシブル基板で作ってみました。
しかし、電卓には本来可動部というものがありません。本来は!
そこで今回の企画は、ロボットアームという動くものに対してフレキシブル基板を使っていきます!
アームの関節という、大きく曲がる部分にどのようにフレキシブル基板を実装するのか…?チャレンジしてみたいと思います!
まずは制御基板をつくろう
思わせぶりな書き出しからフレキの話をするかと思いきや、前座としてアームの制御基板(リジッド基板)のお話をしちゃいます。話の枕として、少々リジッドのお話にお付き合いください。
さて、今回制御するのは主に以下の部品です。
- サーボモーター×3
- DCモーター×2
- ステッピングモーター×1
モーターの見本市みたいになっとる……
というわけで今回の主要部品たちはこちら。
| 型番 | |
|---|---|
| マイコン? | びんぼうでいいの(S) |
| モータードライバ(DCモーター用) | DRV8832 |
| モータードライバ(ステッピングモーター用) | SLA7073MPRT |
今回はとりあえず制御基板に関しては省スペースとか考えなくていいので、Arduino Unoの互換ボードである「びんぼうでいいのs」を用いることにしました。なぜならばarduinoは楽なので!!!
モタドラは一応秋月で手に入るモタドラたちを採用しました。やはり何かあったときにすぐ手に入るのは大事ですよね。
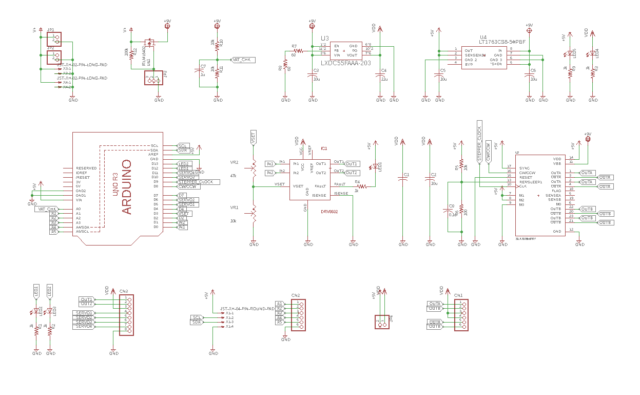
そんなわけなので回路図がこちら。
そしてこちらは配線図!
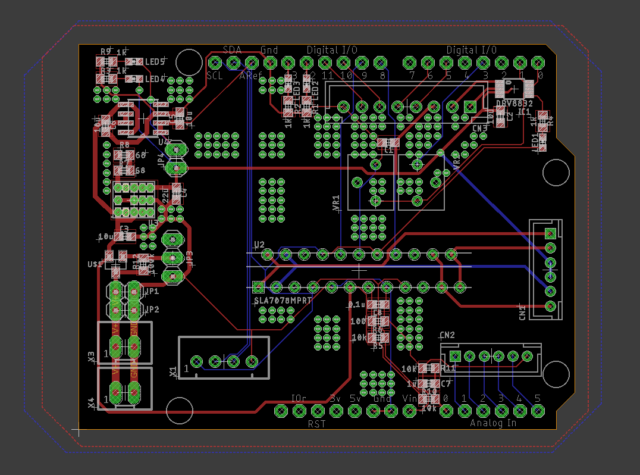
フレキあんまり関係ないのでさくさくいきましょう!!!
…といいつつ制御基板に関してはこれで終わりなので、最後にぜひ私の設計ミスたちもご覧になっていってください。
- 裏返され足を曲げられ斜めにされたFET

- コ ン デ ン サ ー タ ワ ー
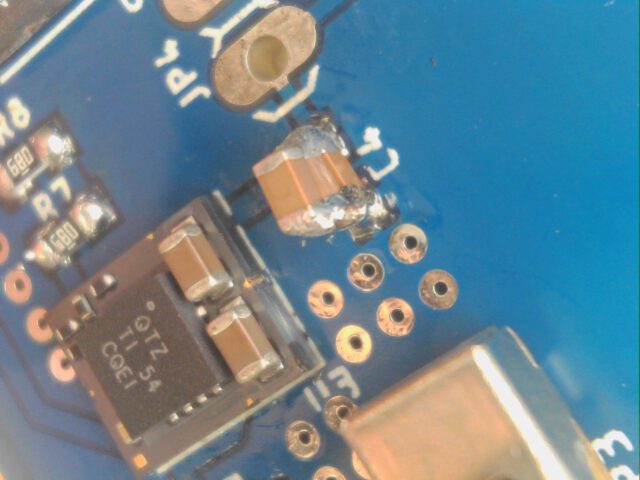
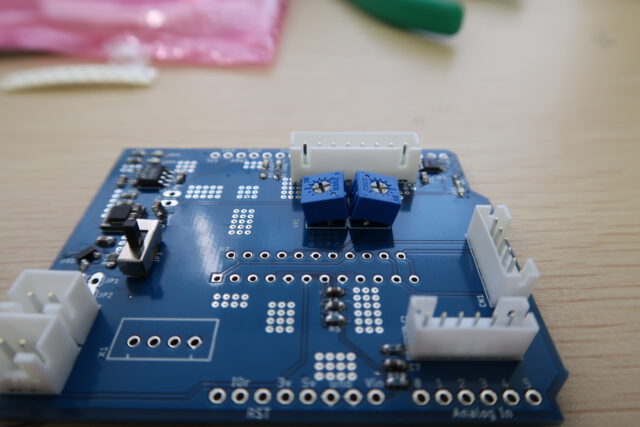
- 入らない可変抵抗
- データシートはよく読みましょう
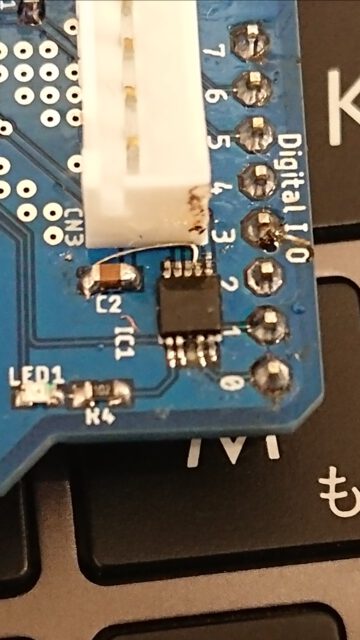
- コンデンサータワー、倒壊 ~はがれゆくパッド・パターン~
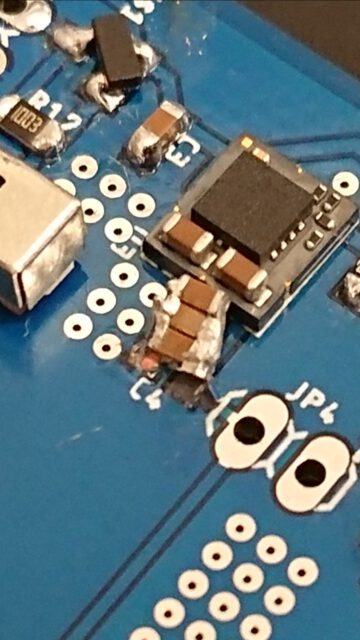
いやぁはんだづけがどんどんうまくなっちゃうなぁ!!!(やけくそ)
フレキシブル基板の設計
本編へようこそ。
ここからはアーム用のフレキシブル基板の設計をしていきたいと思います。
概要
今回のフレキシブル基板は、アームに配線を這わせる目的で使用します。
そこで大事なことは、まず第一に”どうやって関節が曲がったときの伸び縮みを解消するか“です。
調べた結果、いくつか方法があるようなので、後ほど紹介していきます。
回路図とか部品とか
回路図
とりあえず回路図がこちら↓
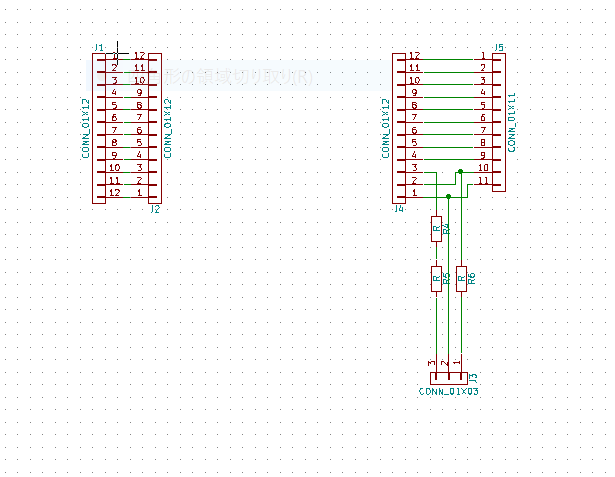
ただのケーブルなのでsimple of the year 2018.特筆すべき点もなし。
コネクタの選定
コネクタを選んでいきます。
前回の基板では結局FH12コネクタしか使わなかったので、今回は別のコネクタも使っていきたい…。
今回コネクタが必要な箇所は二つに分類できます。
まず、フレキシブル基板に対してモーターやセンサー、メイン基板をつなぐ部分です。
こちらには基板対電線コネクタを採用します。こんなの↓
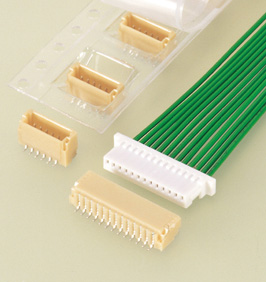
(引用元:SHコネクタ-日本圧着端子製造株式会社)
ではどのサイズのコネクタを選ぶかなのですが、今回はPHコネクタを使うことにしました。
選んだ理由は、一応コンタクトが秋月電子で入手可能であることと、このくらいの大きさであれば容易に圧着が可能だからです。
(本当はSHコネクタ等が使えると小さくて嬉しいのですが、私は不器用なのであんな細かいサイズの端子を手で圧着しようとすると途方もない時間がかかるので使用を避けています)
次に、フレキシブル基板とフレキシブル基板を接続する部分です。
フレキとフレキを接続する部分については、前々から気になっていた「基板対基板コネクタ」なるものを採用してみようと思い、探してみたのですが…
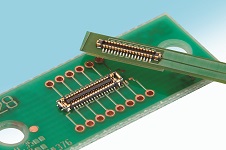
(引用元:BM28 series – ヒロセ電機グループ)
はんだ付けユニバース…
リジッド基板ならまだしも、何度も辛酸をなめさせられたフレキシブル基板のはんだづけでこのピッチの狭さはちょっと避けたい…
というわけで、今回もいつも使っているFH12を採用させていただくことにしました。
(コネクタの選定に関しては、elephantechの社員さんが書いてくださった以下の記事がとても参考になります。コネクタにお悩みの方はぜひこちらの記事読んでみてください!)
基板の設計
今回設計する基板は、ロボットアームに這わせる都合上、形状に注意して設計しなければなりません。
特に、曲げを考慮しなければいけない関節部分については、なおさら注意して設計しなければなりません。
関節部分の基板については今回二種類のパターンを試してみることにしました。
- 基板を曲げる
こちらに関して前回の記事でも軽く紹介をしました。
基板にあらかじめ曲げの加工を施しておくことで、関節が曲がった時に基板の伸びを吸収するという仕組みです。 -
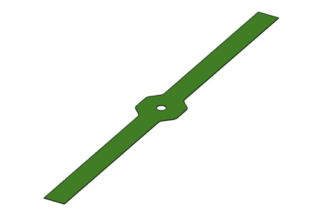
基板を回転軸に巻き付ける
関節を曲げた際の伸び縮みの吸収の方法の二つ目として、基板を回転軸に巻き付けるという方法を試すことにしました。
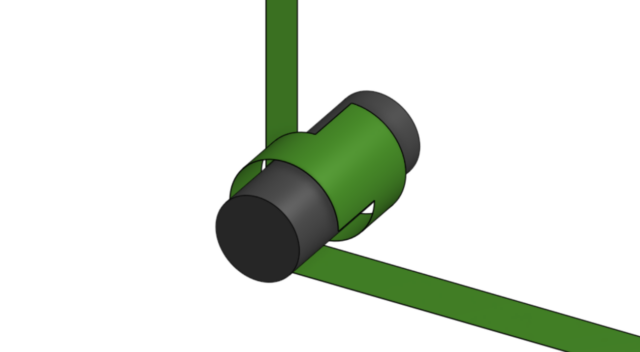
こちらの方法では、基板に特に加工を施すことなく伸び縮みを吸収することができます。
というわけで、以上で紹介した方法を用いてさっそく基板を設計していきます。
ジャンパー抵抗が必要な部分に抵抗を入れて…
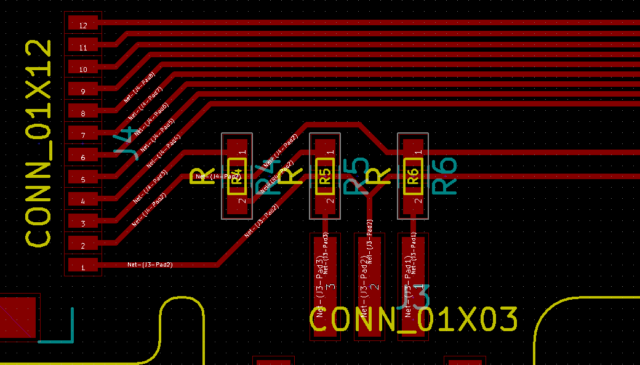
いい感じに配線をして完成です。
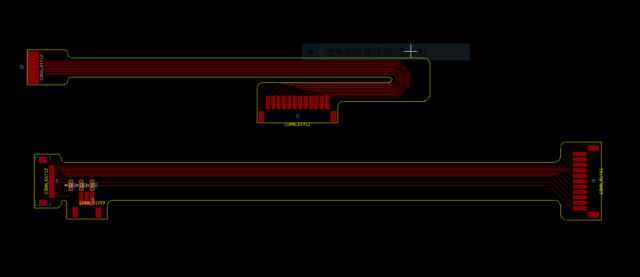
補足
三分クッキング張りの出来上がったものはこちらをやってのけたので、こちらの項目で苦労したポイントなどを解説します。
- 基板の裏表
FPCケーブル同士を接続する際、基板の裏表を考慮する必要が出てきます。(接続部分で、基板の表面と表面をくっつける必要がある)
私は最初、そのことを忘れて設計を行ってしまい、一から再設計という流れが発生しました… -
基板の固定について
アームに這わせている基板はかなり長くなるため、途中で固定する必要があります。基板の固定の方法について、今回以下のような方法を考えていました。
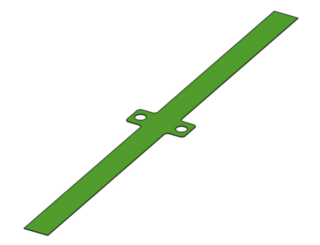
これらはいずれも、基板に穴をあけてねじを通して固定するという方法です。
しかし、これらは正直穴の部分から基板が裂けたりしそうで怖かったので、今回はとりあえず両面テープ等で固定することにしました!おおざっぱ…
まとめ
今回はロボットの可動部に用いる基板の設計を行ってみました。
うねうねした形状の基板と巻きつける形状の基板、二種類の基板を設計してみましたが、実際に実装したらどうなるのでしょうか…?ご期待ください。