【フレキシブル基板にチャレンジ】シリーズ とは
エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けします。
電卓編の次のシリーズとして新たにロボットアーム編のスタートです。引き続きよろしくお願いします!
<< 前の記事
挨拶
こんにちは、平野です。フレキシブル基板にチャレンジシリーズ、引き続きロボットアームを作っていきます。
今回はまたしても基板の再設計をします。悲しいです。
前回↓
【フレキシブル基板にチャレンジ!】ロボットアーム編[5]:機体設計リベンジ
前回までのあらすじ
ロボットアームの関節部分にフレキシブル基板を使いたい!と考えてバネ型の基板を設計してみたところ、P-Flex🄬 の製造仕様を満たしていませんでしたとさ。再設計!!
というわけで
基板の再設計をしていきます!
前回との変更点
前回設計した基板との変更点を挙げていきます。
まず、前回設計したアーム部分の基板がこちら。
今回、せっかく基板を作り直すので関節部分の曲げ方式以外もいろいろと変更してみました。一つずつ紹介していきます。
関節部分の基板の伸び縮み吸収方式の変更
前回の基板では、基板の伸び縮みの吸収を基板をバネっぽく曲げることによって行おうとしていました。
【フレキシブル基板にチャレンジ!】ロボットアーム編[4]:基板曲げ
しかし、実際に試してみたところ、P-Flex🄬 の製造仕様を満たしつつ今回のアームで発生する伸び縮みを完全に吸収するのは難しいとわかりました…。
そこで、今回は基板を軸に巻き付けるという方法を用いて設計してみました。

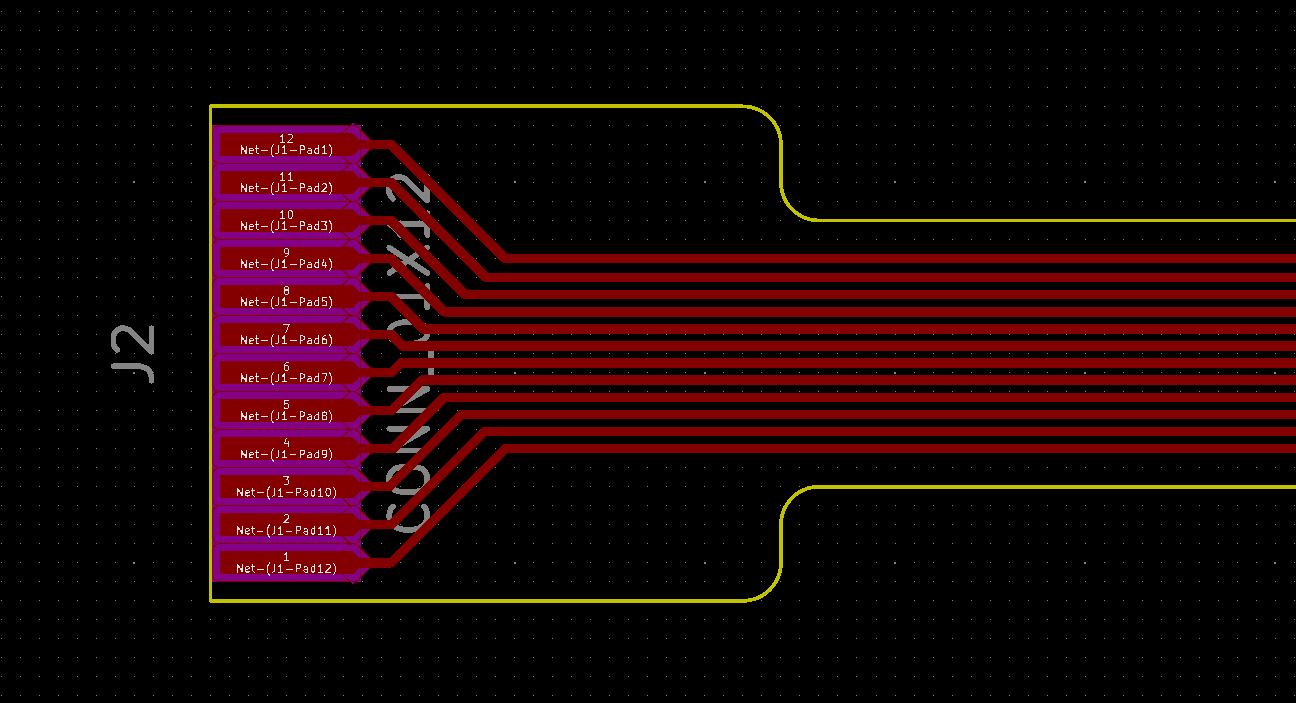
配線幅の変更
基板の変更と同時に、機体に見つかった問題点も解消するために機体の再設計も行いました。
その際、使用するサーボモータを変更したため、基板に流れる電流値が上昇しました。
そのため、以下のページのデータとにらめっこをして、大きな電流が流れる部分の配線幅を3mmに変更しました。
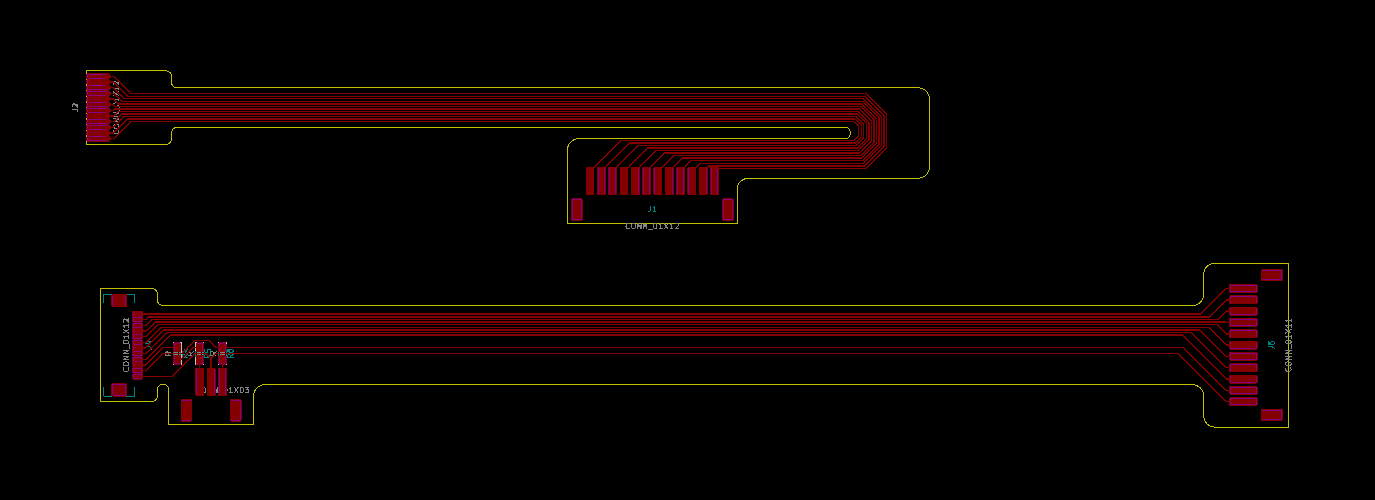
また、配線幅が太くなったことでコネクタもピン数を変更し、配線幅の太いところは複数ピンを用いて大電流に対応するように変更してみました。
Before
After
回路CADの変更
前回までは、KiCadを用いて基板を設計していました。しかし、今回の基板はせっかくなのでQuadceptというまだ使ったことのない回路CADを使って設計してみました。
Quadceptを使ってみたかった理由はいくつかあります。
- 無償版があるので、趣味でも使える(一部機能制限付き)
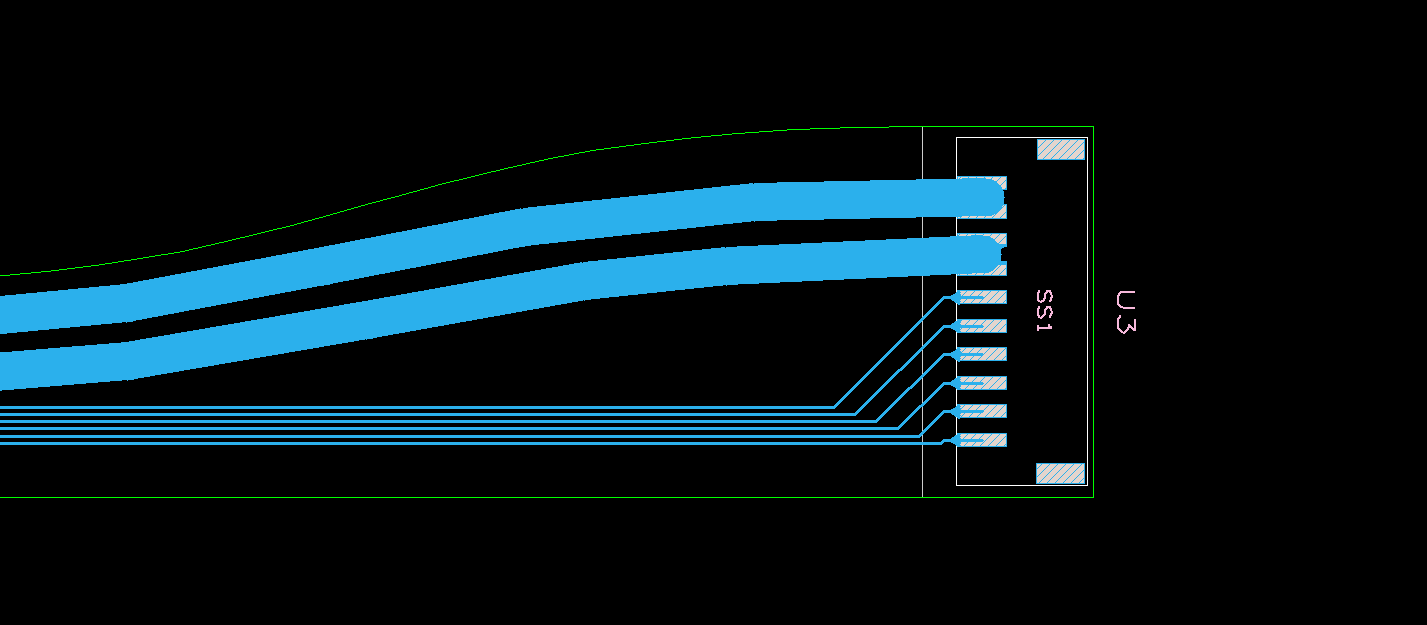
- ほかの無償CADにはあまり見られないティアドロップ機能がある
- MakerFairで見かけていい感じだったから使ってみたかった
特に、フレキシブル基板を設計する際にあると嬉しいティアドロップ機能が無償版にもついているのがとても嬉しいですね。(ティアドロップなど、フレキシブル基板設計のテクニックについては下のブログ記事をご覧ください!)
フレキシブル基板 P-Flex®️ 設計のコツ「パターン設計編」
できたもの
そんなこんなで設計した基板がこちら!
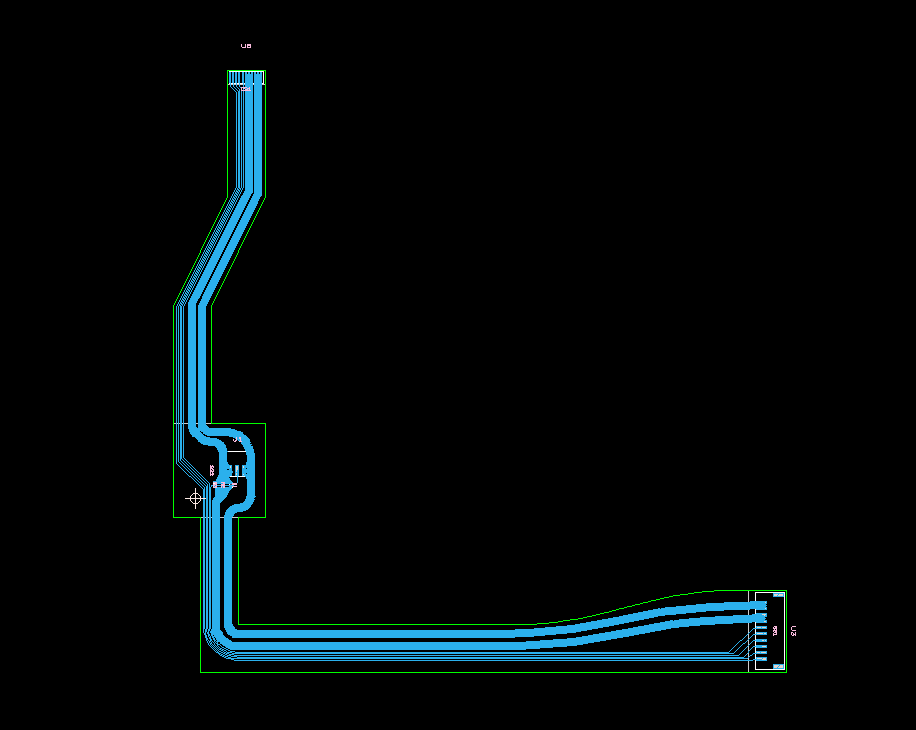
実際に出来上がった基板を使うのが楽しみです。
まとめ
今回は基板の再設計を行いました。
前回との差をまとめると
- 大電流に対応した
- 関節部分の工夫を変えた
- Quadcept使ってみた
という感じです。
Quadceptを使ったおかげで、なんだかそれっぽい基板ができて動作確認もしていないのにちょっと満足した筆者でしたとさ。
次回予告
次回は基板が届き次第組み立てをしていきたいと思います!
ただ、最近生産ラインが立て込んでいるそうなので次の記事はロボットアーム編ではない記事を公開するかもしれません…?
お楽しみに!