【フレキシブル基板にチャレンジ】シリーズ とは
エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートです。 失敗を繰り返し、本人たちは落ち込んでいることも多いのですが、読者のみなさん目線からすると、逆にものすごく参考になるのではないでしょうか。 とても面白いシリーズです!
こんにちは。高橋です。
今回は番外編として、このプロジェクトの為に導入した3Dプリンターを紹介させていただきます。
製品概要
購入したのはTEVO Tarantulaというプリンター。
値段は日本円で25,000円ほど(セール時)で、箱に入って届けられるパーツを自分で組み立てる方式です。
造形可能なサイズは200mm×200mm×200mmで、フィラメントと呼ばれる細い樹脂を融かして一層ずつ積み上げるFDM方式(Fused Deposition Modeling:熱溶解積層方式)での造形ができます。
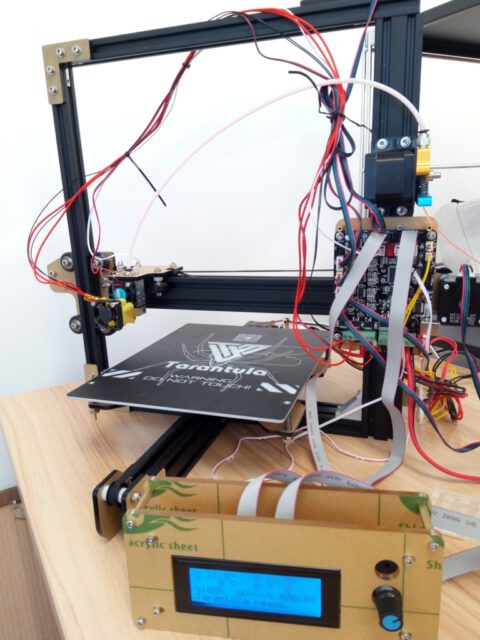
△寝る間も惜しんで働いてくれるTarantula君

△Tarantulaで印刷したエレファンテックのロゴです。オフィス入口のぞうさんの足元に
何故導入したのか
勿論3Dプリンターで遊ぶために買ったわけではありません(要出典)。
実は次回の製作物としてロボットアームを作るという事が決まっており、そのボディを3Dプリントしようというのが元の動機です。

△次回作の試作品たち(色は気にしない)
使う上での注意点
3Dプリンターで物体を出力するには元となる3Dデータが必要なのですが、ただデータを用意するだけで望むものができるというわけではありません。
幾重もの層を積み重ねて物体を形作るというFDM方式の性質上、何の支えもなく空中に飛び出た部分を作るには別に支えを作る必要があります。この支えはサポート材と呼ばれるのですが、サポート材を使用たからといって完全に綺麗な形で出てくるとは限らないのです。
また、傾きが負となるような形状の部分をオーバーハングと言うのですが、此処もプリンターの精度によっては形が崩れることが多々あります。
なるべくオーバーハングが無くサポート材も必要の無いような形状を設計することが綺麗で正確な造形には重要だとわかりました。
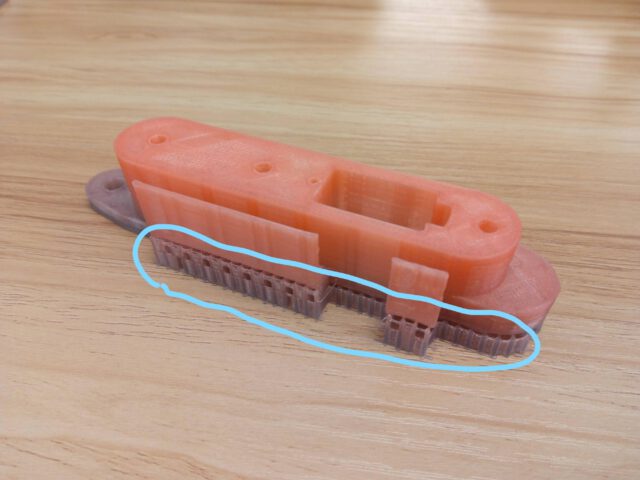
△青い丸で囲った箇所がサポート材です。データを作成するソフトによって形状も変わってきます
今後の活用
この3Dプリンター、導入時点での使用目的はロボットアームの製作という点が大きかったのですが、それだけでなくこれからの製作物のボディを作るのにも使えます。
例えば、kicadなどの基板cadは基板の外形をDXFデータでインポートする機能があるのですが、ボディの部分を3DCADで設計した際にDXFデータを出力しておくことで基板を楽に設計できます。
また、使用するフィラメントを融点の高いABSにすることで、低温はんだ実装でヒートガンを使う際に基板が歪まないように押さえておく道具なども作れます。
ロボットアーム編ではボディの製作だけでなく、フレキシブル基板ならではの少し変わった使い方もします。どんなものなのかはお楽しみに。
個人的な所感
△何だこのゴミは……(困惑)
3Dプリンターを組み立てたのは初めてなのですが、最初の頃は本当に苦労させられました。
まず組み立ての説明書がとても雑で、説明の画像がすり替わっていたり順番自体が違うこともあったり。
やっとこさ組み立ててもフィラメントがノズルで詰まって全然印刷できなくて四苦八苦。
ようやく印刷できるようになっても寸法のずれが酷くて組みあがらない……など。
時々何を血迷ったのか、上図のようなスパゲッティをプリントしてくることもあります。
CADに入力した通りの寸法は中々出ないので、値を変えながら何回か印刷して丁度いい値を見つける……といった面倒な過程が必要だったり。
ですが、そういったデメリットを考えても、やはり望んだ形のものが長くても10時間ほどで出てくるというのは素晴らしいものがあります。
データに修正点が生じてもすぐに訂正して再印刷できるのも3Dプリンターならではですね。
ちゃんと使える人がいるなら一家に一台買っても損はないと思えるくらいには素晴らしいと思いました。
ただ、家(特にマンションなど)で動かす場合は騒音が響かないようにご注意を。
次回
かなり遅くなってしまいましたが、プロジェクト次回はようやく電卓編の基板実装リベンジ記事となります。
前回のはんだ付けの経験に加え、新たな武器を手にして挑みます。