ニュース News
「技術情報」の記事
Elephantech の製造や開発などの技術情報を中心にいろいろな角度から情報を発信します。
AMC 始動(1)
エレファンテック杉本です。2020年4月にAMC(アディティブマニュファクチャリングセンター)を設立し、三井化学から出向いただいた川本氏にセンター長に就任いただき、新体制で皆さんに貢献していこうと動き出しました。 すでにリリースさせていただいたサービスにインクジェット吐出試験サービスがあります。こちらは、日本画像学会のツアーで弊社にお越しいただいたときに出会って仲間になった齊藤が皆さんとともに課題に取り組ませていただきます。 さて、そのAMCですが主に4つのテーマにフォーカスしております。我々の得意なエレクトロニクス、P-Flexでお客様からお声がけが多かったバイオセンサーを含むヘルスケア、以前 セメダインさんと挑戦したことがあるテキスタイル、そして三井化学さんも得意とするオプティクスの4つになります。これらは別々に分かれているわけでなく、クロスすることもあります。例えば、ヘルスケア分野も電極がまつわるものも多く、エレクトロニクスと捉えることもできると思います。今回は、エレファンテックがバイオセンサーにまつわるきっかけとなったストーリーを共有していきたいと思います。 これまでとこれから […]
【インク吐出評価サービス ブログ : 2】R&D用インクジェット装置を動画で紹介
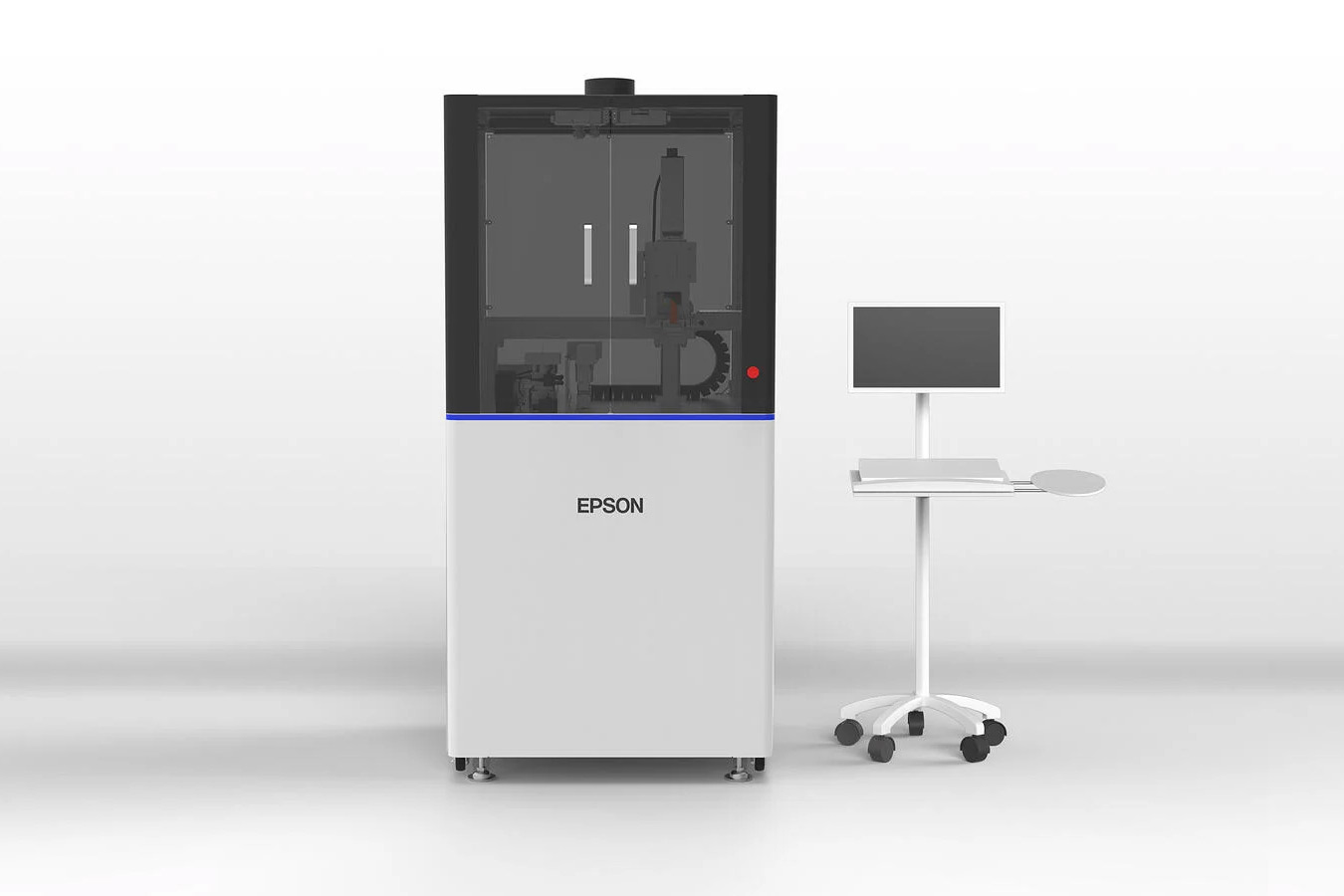
エプソン製のR&D用インクジェット装置を動画でご紹介します。 この装置には、インク滴の飛行観察機能と描画機能が搭載されています。飛行観察機能は、カメラと光源を高速で制御することにより、ヘッドから吐出されたインク滴をリアルタイムに撮影することができます。より専門的な評価として、波形調整や電圧調整も実施可能な装置となっています。初回の吐出評価は基本的に無償で対応するサービスですが、専門性の高い評価や、描画評価などは別途相談させていただく形となっています。 インク吐出評価サービスでは、エレファンテックがエプソンのPrecisionCoreでインクジェット特性を評価することに加えて、最終的な量産化への道筋がイメージしやすくなるというメリットもあります。 エレファンテックが培った量産化へのプロセスを協業して立ち上げていくことで、持続可能な世界を一緒に作り上げていきたいと考えています。 動画より エプソン製のR&D用インクジェット装置の内部になります。中央に映っているのがインクジェットヘッドです。手前側にあるのが観察用のカメラで、奥側に光源があります。 ヘッドから吐出されたインク滴 […]

【インク吐出評価サービス ブログ : 1】インクジェット特性と評価
エレファンテックではインクジェットを活用した製造プロセスにてFPC P-Flex®の量産化を進めています。インクジェットは必要なところに必要な分だけ配置することが可能で、環境にやさしく、デジタル的で造形自由度が高いのが特長です。つまり、アディティブマニュファクチャリングの工法としても、インクジェットは非常に相性が良く、様々な分野で活用が進んでいます。 インクジェットは非接触でインクを飛翔させ、所定の位置に着弾させ、描画する技術です。液体をある決まったサイズに分離し、飛翔させ、高精度に配置するには、インクジェットに適した液体特性を有してなければなりません。 一方で、インクジェットは非常に微小で高速に挙動するため、その特性を正しく高精度に計測する装置がないと言われており、インクジェット現象を正確に評価するためにはインクジェットヘッドを用いて実際に吐出させる方法が確実と考えられます。 そこで、エレファンテックとしてはエプソンの高性能で実績の豊富なPrecisionCoreヘッドを用い、インクジェット特性を下記の試験項目で評価するサービスを立ち上げました。 試験項目 項目の解説 初期充填性 イ […]
アディティブマニュファクチャリングの拡大と社会実装に向けて:インク吐出評価サービス開始しました
エレファンテックでは、必要な部分にのみインクジェットで金属ナノインクを印刷する技術を活用し、環境負荷の少ない製造方法の量産化を進めています。 今後はさらにインクジェットによるAM(アディティブマニュファクチャリング)の拡大と社会実装に向けて、ものづくりの可能性の拡張を加速させたいと考えています。 インク吐出評価サービス開始 その第一歩として、これまで積み重ねたインクジェットに関わる技術を生かしインク吐出に関わる評価サービスを立ち上げました。 このサービスでは、インク吐出評価を行うだけでなく、エレファンテックのこれまでのプリンテッドエレクトロニクスによる量産化実績に基づいた特性改善提案なども行い、インクジェットの応用分野拡大を目指します。 インク吐出評価サービスでは、高性能なセイコーエプソン株式会社(以後エプソン)製ヘッドを用いた、インクジェット用インクを短時間で性能評価するもので、インク受領から吐出評価、報告書作成までワンストップでエレファンテックが実施します。 インクジェットによるアディティブマニュファクチャリングの拡大と社会実装に向けて 環境負荷が低く、デジタル的で造形自由度が高い […]
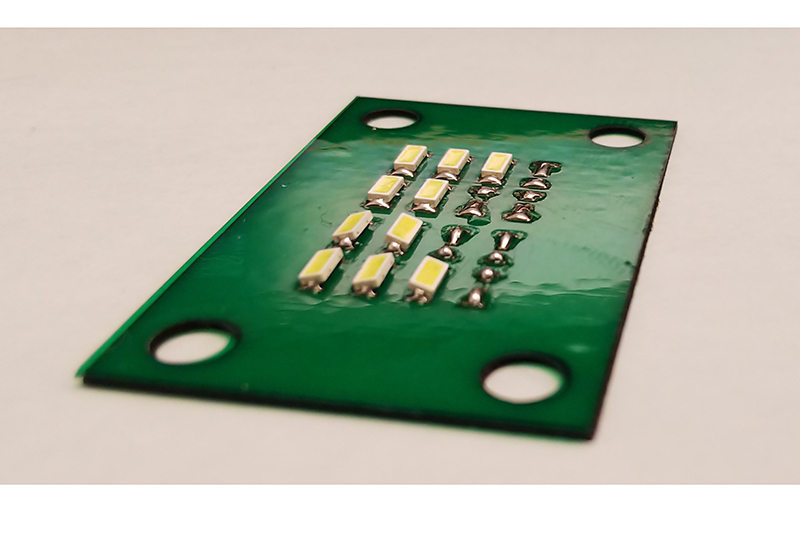
【フレキシブル基板にチャレンジ!】地球儀編[6]:基板製作その2
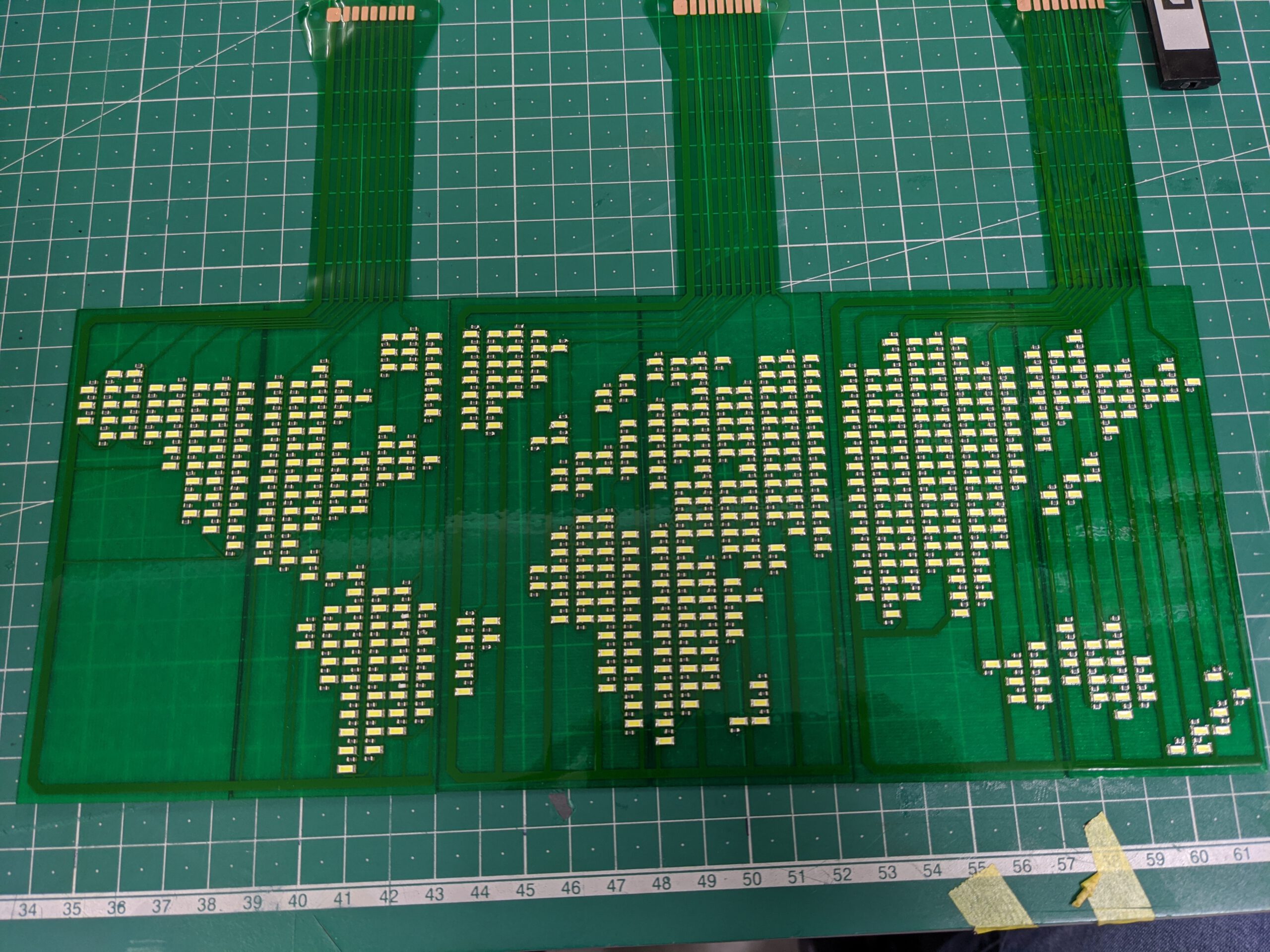
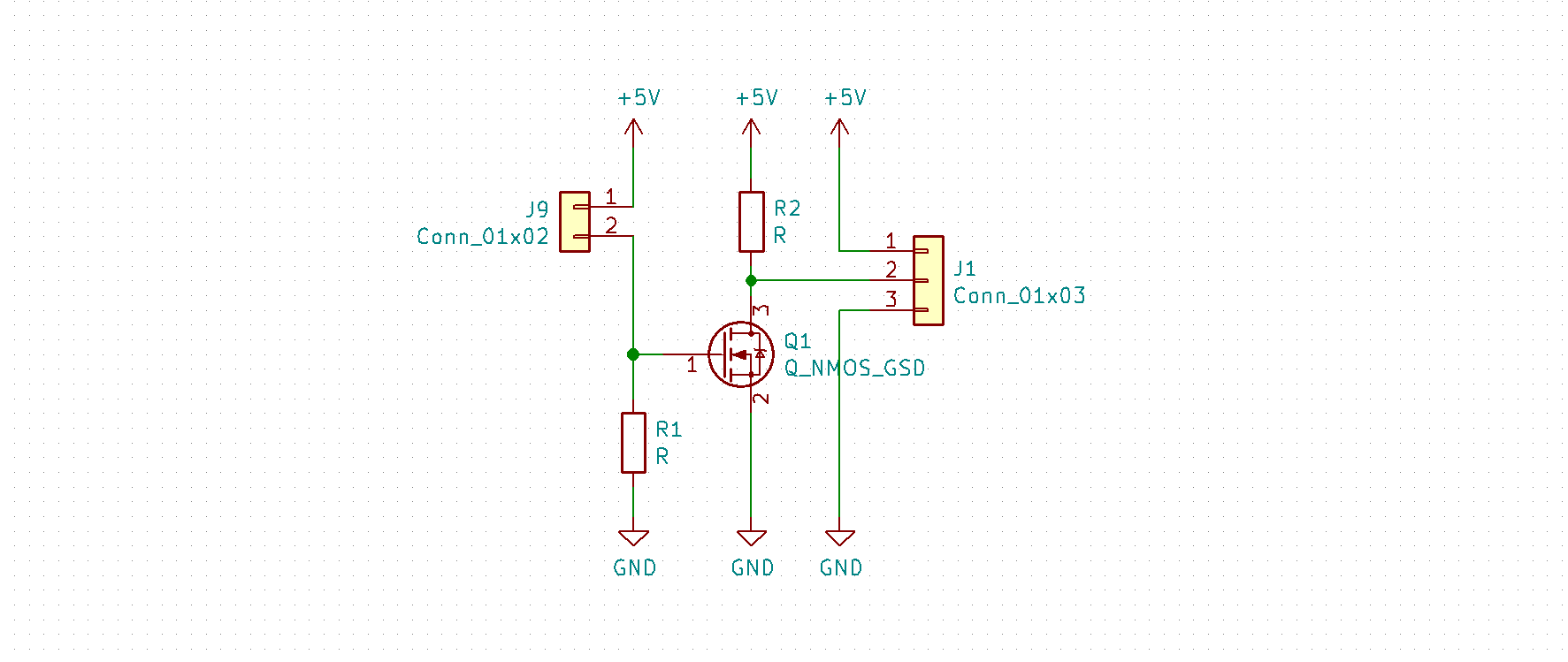
【フレキシブル基板にチャレンジ】シリーズ とは エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けしています。 ご挨拶 お久しぶりです、高橋です。生きてました。 前回、ちゃんとした推奨フットプリントを使わないとダメだよということを学びました。 前回↓ 今回はそれに従って、改めてまともな地球儀の基板を作ります。 …実はこの記事の前にフットプリント色々試してみようぜ記事を出したかったのですが、それ用のテスト基板を手違いでダメにしてしまったのでこっちの記事を出すことにしました。まあ推奨フットプリント使えば大丈夫なんでしょ…? 基板MkII 基板MkIではトランジスタで電流増幅をしていたのですが、ちゃんとLED1つ1つに抵抗挟まなきゃダメじゃないの?ということでそうしました…それに従ってエミッタ-コレクタ間での電圧降下が煩わしくなったのでFETに切り替えました。 いえ、抵抗の問題については最初から気付いてはいたんですが…LEDでの […]

【動画紹介】音を触ることができる楽器:DRUMPAD
こんにちは、しみけんです。 本日はエレファンテックの P-Flex🄬 を使ったデモ品の DRUMPAD についてです。 ワークショップが終わり、しみけんはエレファンテックでハプティクスの研究を行なっていました。 ハプティクスというのは、振動を与えることによってまるで何か別のものを触ってるんじゃないか、などの感覚を引き起こす技術です。触覚フィードバックとも言われています。 その研究をしていた中で、半分遊びのような感じで生まれたのがこの DRUMPAD です。 (1)DRUMPAD とはどんな特長があるのか DRUMPAD は「音を触れる楽器」として生まれました。また大きな透明タッチセンサーの P-Flex🄬 を使っています。見た目がクリアですごくかっこいい物になったなと思います。 また、タッチセンサーにハプティクスを組み合わせている理由は、タッチセンサーなどでスイッチを作った場合「オン/ オフ」のフィードバックがないため、様々な方法でフィードバックをする必要が出てきます。 振動を伝えることでフィードバックを与える方法を「ハプティクス」と言います。その研究をしている中で作られた「DRUMP […]

【めっき自動搬送装置ができるまで】[7]
こんにちは。北島です。 前回は実際に工場内で実機を立ち上げて動かした話でした。実際に事故なく稼働したときにはホッとしました。 第1回 第2回 第3回 第4回 第5回 第6回 今回はいよいよ最終回です! スマートファクトリー関連の追加機能や、現場と生産管理・開発をつなぐ機能など、めっき自動搬送装置の現在をお伝えします。 サーバーにめっきの開始と終了を報告 各工程でフィルムのバーコードを読み取っていくことでサーバーにデータが送られる仕組みになっています。 めっき搬送装置にどのフィルムを投入したのかを知らせることができれば、そのフィルムがいつどのフィルムと一緒に生産されたのか、その際の生産パラメータがどうだったのかなどをすべて記録に残すことができるわけです。 社内ネットワークシステムに繋がれた状態で、APIを叩くことでフィルムの工程登録をする機能を追加しました。 これによって、 搬送装置のアプリケーションでジョブ登録画面を開く フィルムのバーコードを読み取る フィルムをフレームに固定する 2,3を必要なだけ繰り返す フィルムのついたフレームをかごに固定する 2~5を必要なだけ繰り返す ジョブ […]

【フレキシブル基板にチャレンジ!】曲がる有機EL編:電圧保護回路を作ろう
【フレキシブル基板にチャレンジ】シリーズ とは エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けしています。 ご挨拶 こんにちは、高橋です。 今回は単発記事として、フレキシブル基板で電圧保護回路を作ってみます。 曲がる有機ELとは こちら、コニカミノルタさんの製品であるフレキシブル有機ELです。 普通の砲弾型LEDやチップLEDを光らせると点光源で結構眩しいものですが、このような有機ELは面で均一に光ります。なので目に優しい!しかもこの子は曲がるので実装場所を選ばないんです! あとなんかぼんやり光っているのが雰囲気良いのでインテリアに使うととても良さそう ※個人の感想です ですが、これをいろんな人たちが試しに使ってみようとする上で少し問題があるそうです。というのも、とりあえずこのパネルを電源装置に直結して光らせ、もっと明るく光るのかな?みたいな感じで電圧上げてお陀仏することが多いのだとか。そしてこれ1枚が地味にウン百円。(データシートは上のリンクの一番下にあります) だったら、電圧 […]
【フレキシブル基板にチャレンジ!】浸水センサー編[2]:フレキシブル基板でセンサーを作ろう
【フレキシブル基板にチャレンジ】シリーズ とは エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けしています。 これまでもいろいろなシリーズを展開してきましたが、新シリーズとして浸水センサー編がスタートしました。ご期待ください。 挨拶 こんにちは、平野です。 今回のシリーズでは、フレキシブル基板を使って浸水センサーを作っています。 ほしいのはこんなセンサー↓ ・機能:少しでも水に濡れたら信号を出力 ・形状:どんなところにも設置しやすい ↓前回↓ 【フレキシブル基板にチャレンジ!】浸水センサー編[1]:フレキシブル基板でセンサーを作ろう 前回までのあらすじ 試作品が届きました。やったね ちょっとした試験をしよう 前回作った試作基板には電子回路は一切乗っておらず、あくまで浸水したら通電が発生する部分のみの基板でした。 そこで、周辺の回路を考えるためにも浸水センサーに水を垂らした際にどのくらいの抵抗値を示すのかを確認してみます。 センサーに垂らす水の量を変えながら、センサーの抵抗値を見ていきます。 ちょっとしか濡れてな […]
【フレキシブル基板にチャレンジ!】浸水センサー編[1]:フレキシブル基板でセンサーを作ろう
【フレキシブル基板にチャレンジ】シリーズ とは エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けしています。 これまでもいろいろなシリーズを展開してきましたが、新シリーズとして浸水センサー編がスタートしました。ご期待ください。 挨拶 こんにちは、平野です。 このシリーズでは、浸水センサー編と銘打ってフレキシブル基板で浸水センサーを作っていきます。 今回は初回ということで、とりあえず試作品第一号の設計をします。 経緯説明とか 東工大ロボット技術研究会には、水中ロボコンに取り組んでいるアクア研というグループがあります。 キャッチコピーは“水はともだち” ↓は最新の活動報告。ぜひ覗いてみてください(身内の宣伝) ことの発端は、そのアクア研のボスとの会話でした。 ボス「いいかんじの浸水センサーほしい」 ぼく「フレキシブル基板ちょうどいいんじゃね?」 そう、実はP-Flex®には水に濡らしてもいいような製造オプションがあり、フレキシブル基板なのでどんなところにも設置しやすく浸 […]
【フレキシブル基板にチャレンジ!】リフロー編[2]:卓上リフロー炉使ってみた
【フレキシブル基板にチャレンジ】シリーズ とは エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けします。 いろいろ新シリーズが出現中しています。そのひとつとしてリフロー編のスタートです。よろしくお願いします! 挨拶 皆さんおはようございます。平野です。 今回は前回elecrowで発注したステンシルを用いて、卓上リフロー炉でリフローしてみた時のことを書いていきます。 前回↓ 前回までのあらすじ elephantechで卓上リフロー炉が使えるようになったので、喜び勇んでelecrowにステンシルを発注しましたとさ。 愛すべき卓上リフロー炉↓ 届いたステンシル↓ みんなステンシルは持ったか!!!行くぞ!!! いざリフロー さあリフローのお時間です。ちなみに断っておきますが私はリフロー初心者です。もし下手くそでも、というかど下手くそなんですが平にご容赦を… さて、今回はんだ付けをするのはこのelephantechのサンプル基板。 乗っている部品は主にマイコン、チップ部品です。この中で一番難易度が高そうなの […]
【フレキシブル基板にチャレンジ!】新3Dプリンター導入編[3]:湿気対策
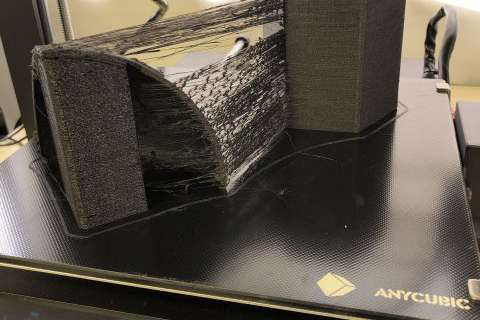
【フレキシブル基板にチャレンジ】シリーズ とは エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けします。 ご挨拶 高橋です。久しぶりに3Dプリンターネタ。 湿気inフィラメント FDM方式の3Dプリンターで使用されるフィラメントの種類は様々ですが、とりあえずこれ使っとけっていうものにPLAとABSがあります。 (軽く解説:PLAは印刷が失敗しにくく硬い素材で、ABSは柔軟で割れにくい素材という感じ。詳しくはググるとたくさん出てくるので割愛) このうち特にPLAで顕著なのですが、吸湿という問題があります。フィラメントが水蒸気を吸ってしまうと加熱した際に水蒸気が発生し、さらに加水分解を起こすため溶融温度が下がり流動性が上がってしまいます。こうなると、発生した水蒸気のガス圧によりフィラメントの押し出しを止めてもフィラメントが漏れ続けてしまうようになり、樹脂が滅茶苦茶に糸を引きます。 参考リンク↓ そして、ちょっと前まで我々のプリンタで使用していた材料がCoPAという耐熱性の高いフィラメント […]

【めっき自動搬送装置ができるまで】[6]
こんにちは。インターンの北島です。 秋口の涼しさを感じる季節になってきました。夏は終わりを感じると少し寂しいですね。 ここまでブログを読んでいただけている方、ありがとうございます。 第1回 第2回 第3回 第4回 第5回 前回はソフトウェアのアルゴリズムの話をしました。パズルを解いていくのが楽しい人にはアルゴリズムを考案する作業もきっと楽しいですよ。 今回はいよいよ工場でのライン立ち上げの話です。 これまでハードウェアの設計・試作、ソフトウェアの設計製作を行ってきましたが、ラインが立ち上がって生産開始できなければ遡ってやり直しが必要になります。 できればそんな事になりたくはないですが、何事もやってみるまで結果はわかりません…。 資材調達 基本的には試作と同じくミスミから購入したアルミフレームです。しかし試作は2m、今回は10mのラインですから、アルミフレームの数もすごいことになりました。 上の写真の左側の細長いダンボールの中身がすべてアルミフレームです。外枠の分だけでこれだけあります。写真の右側は浴槽です。 これらを開封して間違えないように組み立てていく必要があるわけです […]
【フレキシブル基板にチャレンジ!】地球儀編[5]:フットプリント模索
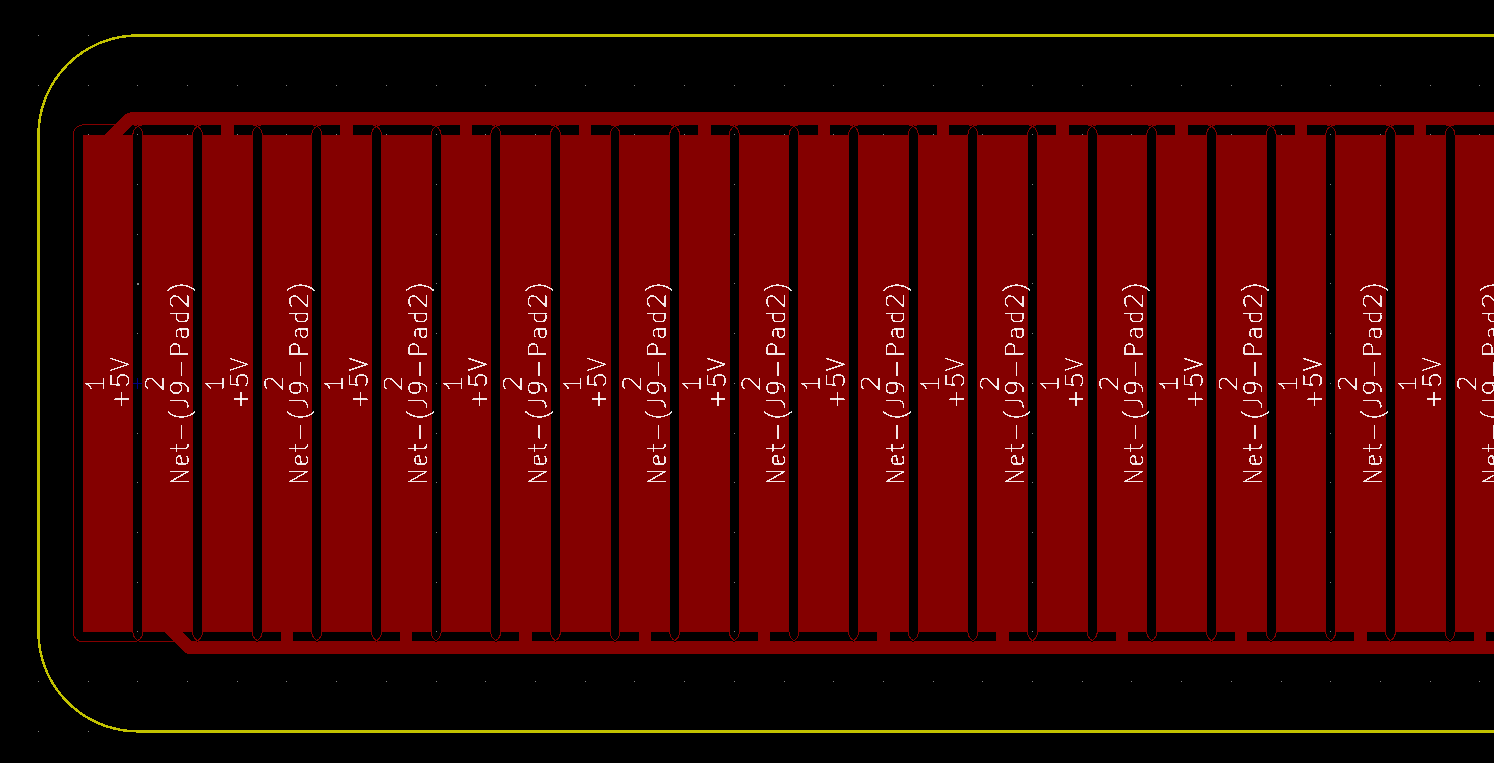
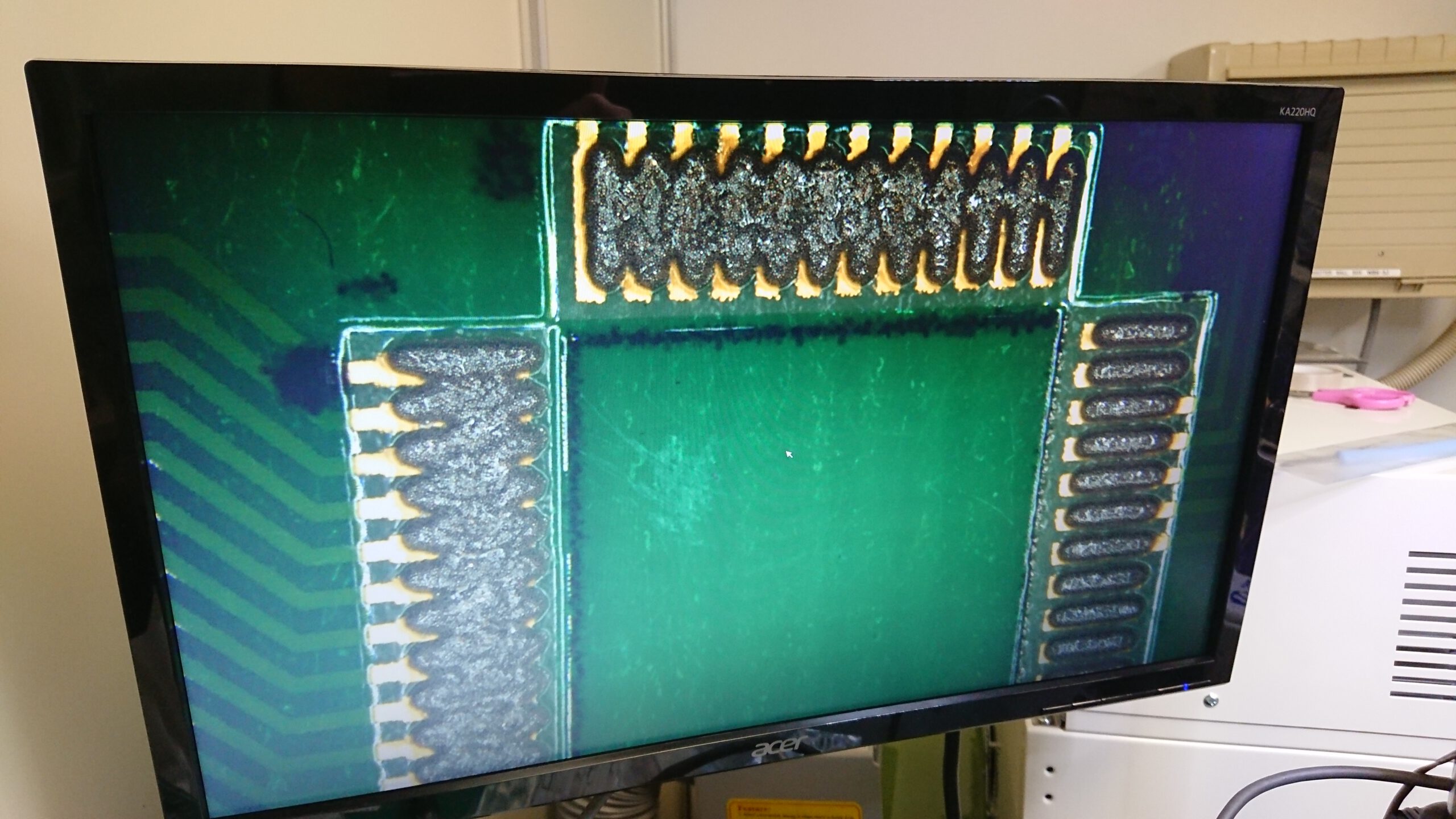
【フレキシブル基板にチャレンジ】シリーズ とは エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポート。 新シリーズ地球儀編もよろしくお願いします! どうも、高橋です。 前回のおさらい パッドの形によってリフローしたときの整列力(?)が変わってくるらしい。 そもそも前回作った基板は推奨形状をガン無視してたので、ちゃんとした形のフットプリントを使いましょうという感じの流れがありました。 試験基板到着 とりあえず到着。上のものがリジッド基板で下がフレキシブル基板です。 左右で大きさが違うのはちょっと事情がありまして…フレキシブル基板のパッドの右側のものはレジストの乗っていない(露出したエリア)が推奨されたパッドの形状になるように作ってあります。逆に左側はパッド設計を推奨の通りに行い、それに対してp-flexの規定であるクリアランス0.2mmの設定をかけたものになります。 つまりここがちょっとした罠なんですが、レジストがフットプリントにオーバーラップするような設定を行った場合、kicadはパッドに対して […]
【めっき自動搬送装置ができるまで】[5]
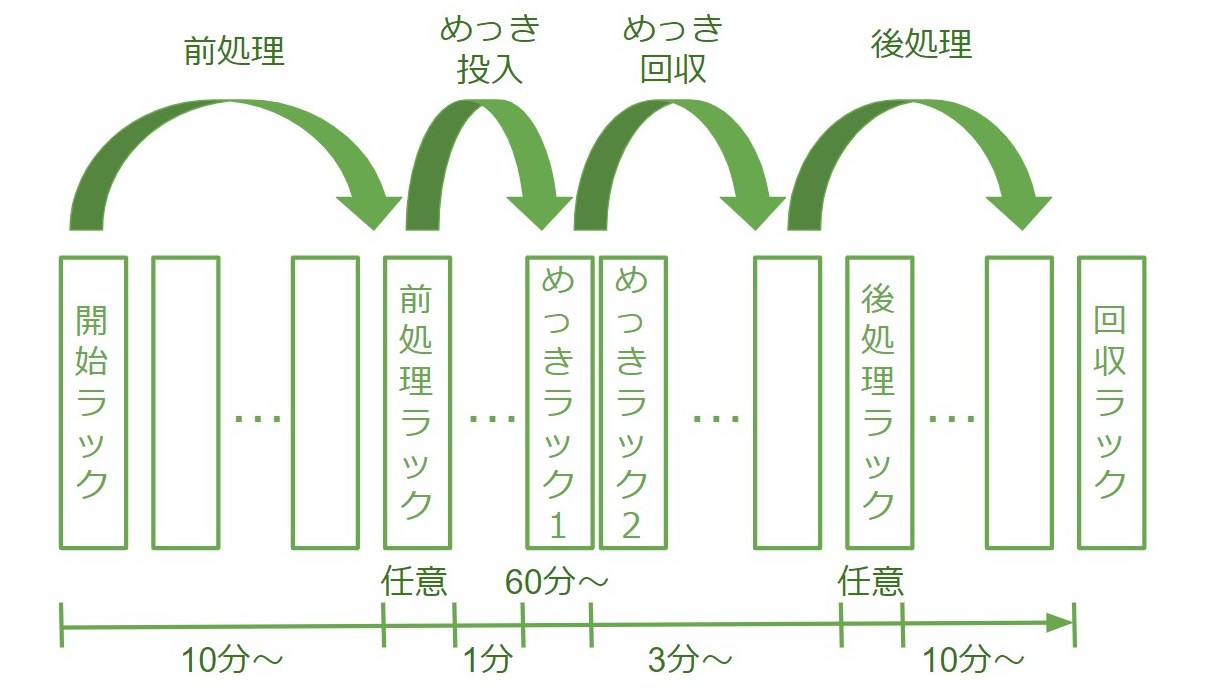
こんにちは、インターンの北島です。 このブログは企画が立ち上がってから1年近く放置してしまったという話を第1回で書きましたが、逆に書き始めてからはグイグイと進んで早くも第5回です。 案ずるより産むが易しというやつですね。 読んでいただけている方、ありがとうございます。 第1回 第2回 第3回 第4回 前回は試作した際のことを書きました。いかがだったでしょうか? 今見返してみるとなかなか拙いハードウェアを試作していますが、その失敗を生かして本番は良いものが作れたと思います。 さて、今回は実際に搬送装置を動かすための頭脳であるソフトウェアについて説明したいと思います。 前回まででPCからマイコンを通してモーターを回し、かごを運ぶことができました。原点復帰もできるようになりましたから、かごを持って、運んで、置いてをずっと繰り返せるようになりました。 しかし、それだけではめっきはできないのです…。 めっきのスケジュール めっき生産は前処理→めっき処理→後処理で成り立っていることは第1回で書きました。 ライン上にめっき槽は3つあり、うち1~2槽が稼働しています。 &n […]
【めっき自動搬送装置ができるまで】[4]
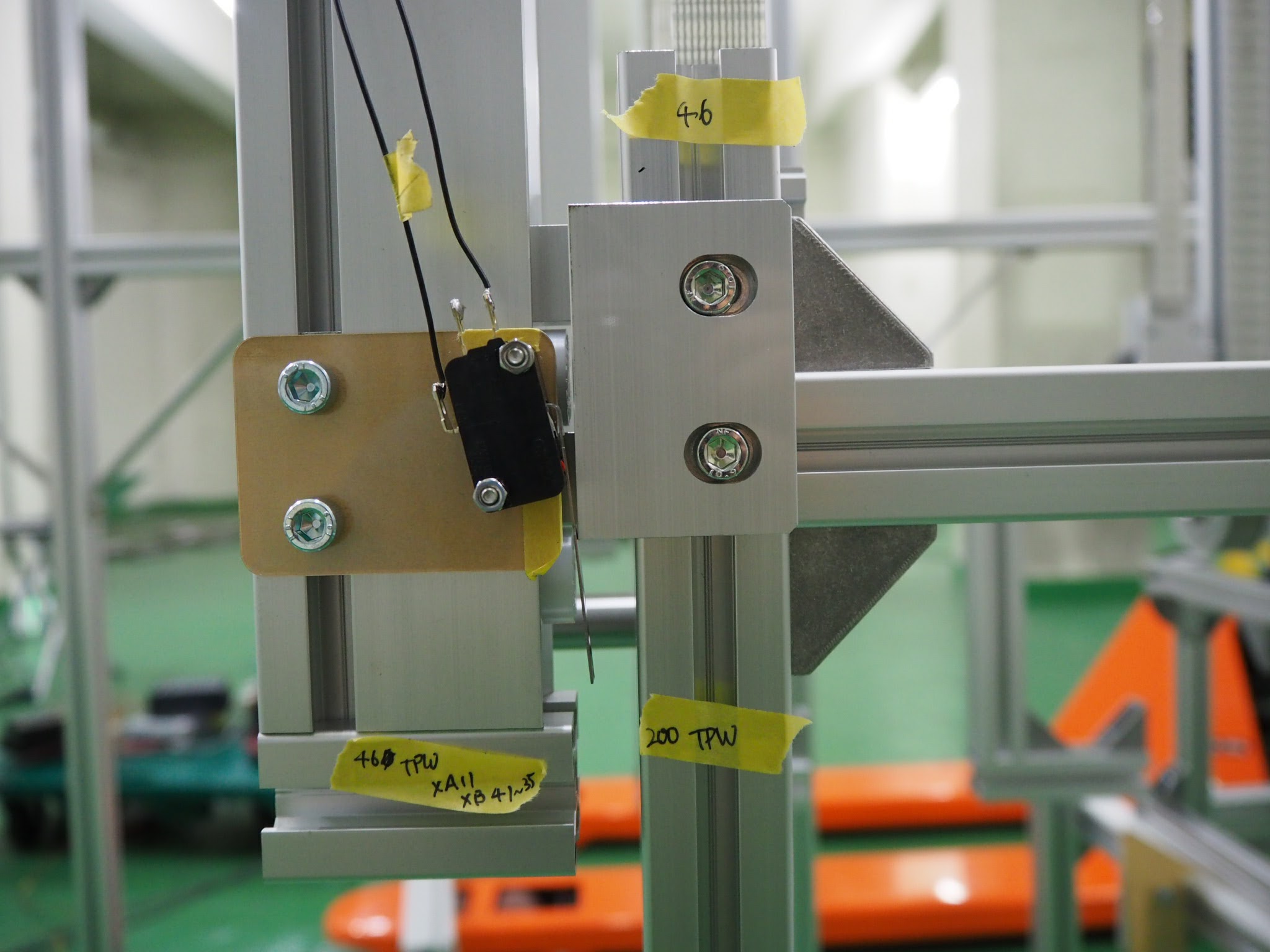
こんにちは、インターンの北島です。 前回は搬送装置に必要不可欠な、ステッピングモータの動かし方についてお伝えしました。 PC→マイコン→ドライバ→ステッピングモータという流れがお伝えできたかと思います。 第1回 第2回 第3回 続きまして今回は、ついに(!)、実際に試作をした際のことを書きたいと思います。 以下が実際に作った試作品の動作確認動画です。 第1回の記事に載せた現状の動画とはだいぶ違いますが、だいたい同じことをしているのがわかるかと思います。 また、第2回の記事で書いた補強について、この動画では四隅を補強するタイプ(角を斜めにつないでいるプレート)と対角線をつなぐタイプ(左端面のワイヤー)を両方使っていることがわかります。 実際に作ってグイグイ押したり引いたりして比較してみた結果、対角線をつなぐタイプの補強を本番では採用しました。 水平方向原点復帰の仕様 前回の最後に、モータを動かしている間に少しずつずれてしまう可能性があるので原点復帰をしてあげる必要があるということを書きました。 原点復帰は基本的には、「ある位置に固定されているセンサーが反応するまでゆっくり動かす」という動 […]
![【フレキシブル基板にチャレンジ!】地球儀編[4]:基板到着](https://elephantech.com/wp/wp-content/uploads/2019/09/DSC_0164-207x320-2.jpg)
【フレキシブル基板にチャレンジ!】地球儀編[4]:基板到着
【フレキシブル基板にチャレンジ】シリーズ とは エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けします。 新シリーズとして地球儀編のスタートです。今後ともよろしくお願いします! ご挨拶 高橋です。 今回は頼んでいた地図の基板が完成したため、それを使って色々遊んでみることにします。 威容 補強板を貼って、土台に差し込んで立たせてみました。もう完成では? 円柱にしてたら補強板の枚数も多くしなきゃいけなくて位置合わせも大変だったんだろうな…六角形は正義。 ところで、この部分よく見るとアメリカ大陸になってます。 LED実装への道 このアメリカ大陸だけでLEDが169個あります。注射器でクリームはんだを盛り盛りしていては日が暮れても終わらないので当然のごとくステンシルを使います。 ところでelecrowではステンシルが発注できるのですが、お値段が16ドル。高いわけではないですが決して安くなく、そして今回は量産するわけでもないのでもう少し安く早く手軽に手に入らないものか…と。 &n […]

【フレキシブル基板にチャレンジ!】地球儀編[3]:試作
【フレキシブル基板にチャレンジ】シリーズ とは エレファンテック技術ブログ新企画、東工大の学生が初めてフレキシブル基板を使って、実際に電子工作する試行錯誤のレポートをお届けします。 新シリーズとして地球儀編のスタートです。今後ともよろしくお願いします! ご挨拶 ご無沙汰しております。高橋です。今回は2Dプリンタと3Dプリンタで地球儀を試作してみたいと思います。 前回の記事で、張り合わせて押さえつける接続がうまく行くのかどうかチェックしました。どうやら大丈夫そうだったので今回は実際にフレキシブル基板を発注……の前に。 フレキシブル基板をいきなり発注しても時間がかかる上に失敗したら目も当てられないので、今回はとりあえず紙で印刷してみてスペースや曲げ半径などに無理が無いかどうかをチェックする、という目論見です。 P-Flex®は今回登場しません。 作ってみた 先日考えなしにとりあえず発注したリジッド基板が届きました。 これは電流増幅基板です。これらの上にマイコンの乗った制御基板を刺すのですが、増幅基板は同じ構造の3枚の基板を向きを変えて重ねること […]
【めっき自動搬送装置ができるまで】[3]
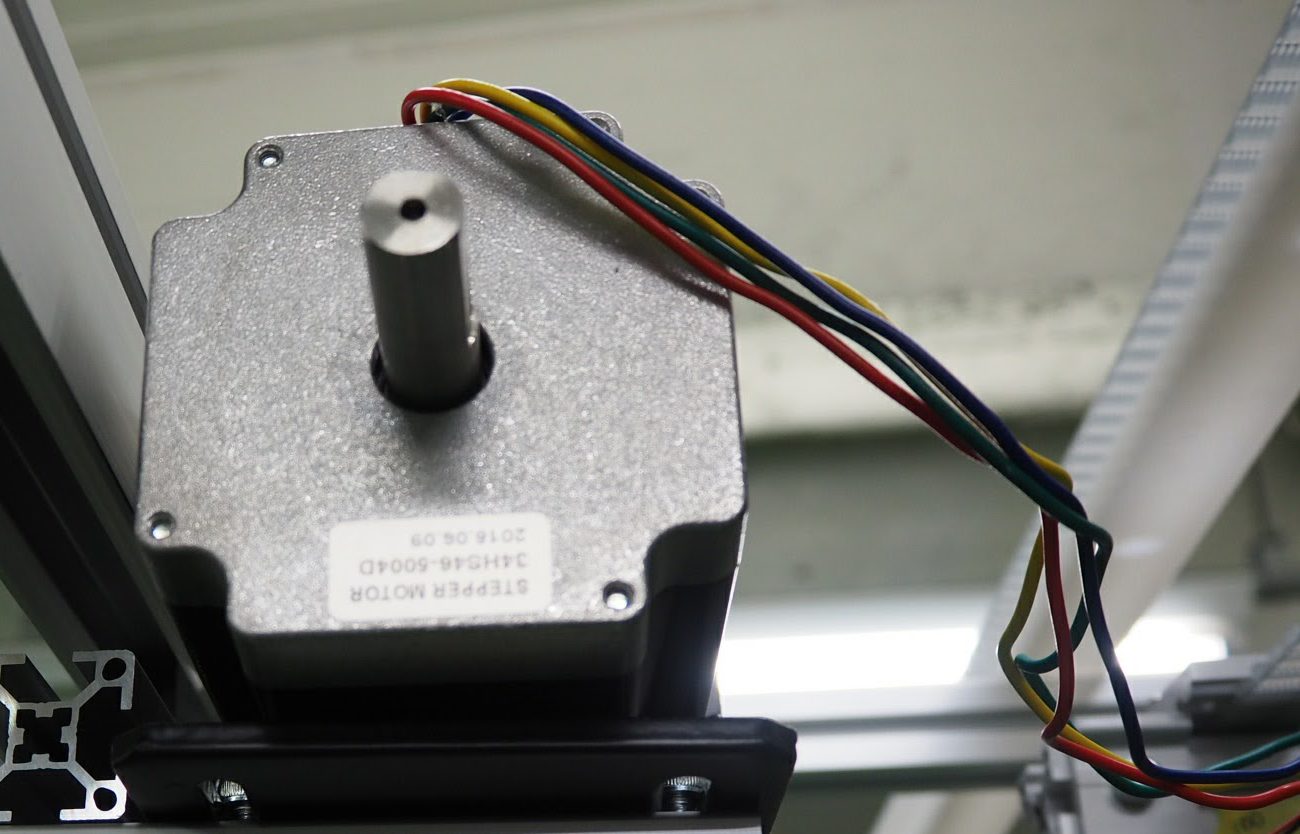
こんにちは、北島です。 第1回 第2回 前回はCADを使ったハードウェアの要素設計をしました。アームでかごを持ち上げる→運ぶ→置くという一連の流れを水平と垂直の動きだけで実現しようというものでした。 動かすためには動力源が必要です。 というわけで、3回目の今回は「モーターを回してみよう!」です。 ぱっと見は小学生が理科の授業で習うやつですが… そんな簡単じゃないのです 第1回で書いたとおり、都市鉱山から発掘してきたステッピングモータを使います。ドライバも発掘できたのでありがたく使います。 これまた第1回に書いたとおり、「モーター」ではなく「モータ」、「ドライバー」ではなく「ドライバ」と呼びます。機械系に残されたバグみたいなものなので気にしないでください。同じ意味です。 さて、ステッピングモータとかサーボモータとか聞いたことない人にとって、モータというのは+と-を電源につないだら回るものだと思うのではないでしょうか。 ところがこのモータには電線が4本あります、果たしてどうしたらいいのでしょう?こんなモータ見たことないと思います。 実はそもそもステッピングモータというのは普通のDCモータ( […]
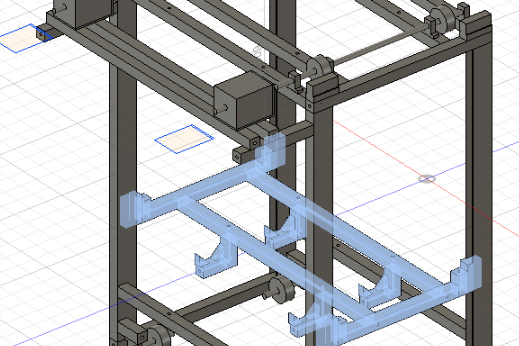
【めっき自動搬送装置ができるまで】[2]
こんにちは。 実は前回の投稿は書き始めてから公開まで1年以上放置するという申し訳ないことをしていた北島です。 第1回 前回は「そもそも作成可能なものなのかどうか」ということを下調べしたり少し計算をしたりしながら考えました。 運ぶものの重さが搬送装置全体の強度を決定し、それによって全体の設計が決まることが伝わったかと思います。 今回は「持ち上げる・運ぶ・置く」ができるような機構設計です。 一応機械系の人間ですから、第1回のポンチ絵のあとはCADで設計していきますよ。 最近弊社は機械系CADのために、1台SolidEdgeが入ったPCを導入しました。機械系の人間としては楽しくなってきました! エレファンテックでは毎週金曜日に社内セミナーという、自分が携わっている業務や自身の知見を紹介する会があるのですが、実はこの記事は社内セミナーで僕の順番が回ってきたときに話した内容の二番煎じだったりします(笑)。 持ち上げるものは? 前回に書いたとおり、15kgくらいの、A2サイズのフィルム(600×420mm)がたくさんぶら下がっているかご(ケージ)です。 画像を見ると上側に持ち手が2本 […]
SNS
最新のおすすめ情報や更新情報を
お届けしております。
